2014年05月28日




トヨタ自動車、リハビリテーション用パートナーロボットの臨床研究モデルを開発
-2014年秋より、医療機関への導入を開始予定-
トヨタ自動車(株)(以下、トヨタ)は、2011年に発表した「介護・医療支援」領域のパートナーロボットである「歩行練習アシスト」と「バランス練習アシスト」を改良し、病気やケガなどで歩行やバランス確保が不自由な方のリハビリテーション支援を目的とした臨床研究モデルを開発した。
今回開発した臨床研究モデルは、2007年末から藤田保健衛生大学(愛知県豊明市)と共同で開発を進めてきた。2011年より医療機関のご協力のもと実証実験を行い、運動学習理論に基づいたトレーニング機能の適正化やロボットの装着方法の簡易化などの改良を施し、リハビリテーション現場での使い勝手を大幅に向上させている。
トヨタは、「すべての人に移動の自由を」という考え方のもと、「歩行練習アシスト」と「バランス練習アシスト」の早期実用化を目指しており、2014年秋より、臨床研究モデルをそれぞれ20拠点の医療機関に有償で提供し、今後の臨床研究に活用いただく方針である。
なお、今回開発した臨床研究モデルは、2014年6月5日から7日まで開催される第51回日本リハビリテーション医学会学術集会(於 名古屋国際会議場)への出展を予定している。
| 名称 | 歩行練習アシスト | バランス練習アシスト |
| 特長 |
|
|
| 主な改良点 |
|
|
| 大きさ | 幅1200、長さ2560、高さ2350 mm | 幅1870、長さ3040、高さ2350 mm |
| 写真 | 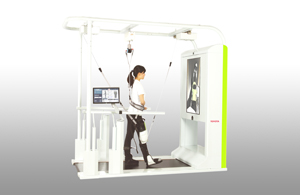 |
 |
以上
ダウンロード
-
-

- 歩行練習アシスト
-
-
-

- 歩行練習アシスト(脚部装着部分)
-
-
-

- バランス練習アシスト
-
-
-

- バランス練習アシスト(搭乗部分)
-
