

- ガーディアンは人間の能力を置き換えるのではなく、増大させるという考え方で開発
- 戦闘機のコントロール技術にヒントを得た、人間と機械双方の入力による調和的制御
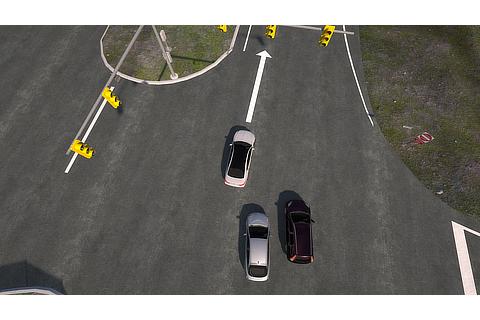
- カリフォルニア州の高速道路で実際に発生した実験車の事故をビデオと3Dアニメーションで再現
トヨタはヒトの力を倍に活用している、ということが、Toyota Research Institute(以下TRI)がこの12か月間に取り組んできたことは何かという質問への回答になります。オンボードカメラ、センサー、3Dアニメーションなどを活用し、本日のCESでのプレスカンファレンスで、3台が関係するカリフォルニア州の高速道路での事故(幸い、けが人は発生しませんでした)を再現しました。
TRIのCEOで、トヨタ自動車(株)(以下、トヨタ)のフェローでもあるギル・プラットは、次のように話しました。「私たちは、その事故の最中に何が起きたかを知っています。なぜなら、私たちはその現場にいたからです。私たちの実験車は自動走行モードを作動させず、手動走行モードで高速道路を走行し、サンフランシスコのベイエリアにおいて多くのトンネルや橋などでの走行データを収集していました。事故のデータを実験車から取り出した際に、『将来のToyota Guardian™(高度安全運転支援)システム(以下、ガーディアン)を組み合わせれば、今回の事故の被害はもっと小さくできたか、あるいは避けることが出来ただろうか』と自問しました。そしてその答えは、Yesだと考えます。」
約3年前の設立当初、TRIは自動運転技術の開発を二つのアプローチで行うことを表明しました。つまり、あらゆる環境で完全に、もしくは限られた運行設計領域(operational design domain《ODD》)において、人間のドライバーを不要にする「ショーファー」。一方もう一つは、人間の能力を置き換えるのではなく増大させるという考え方で開発している、「ガーディアン」です。「ガーディアン」は、人間のドライバーが常にクルマをコントロールする前提で、事故が起こりそう、もしくは実際に差し迫っている際に、ガーディアンがドライバーによる操作と協調させながら正確な回避に繋げるというものです。
TRIの本年の重要な技術ブレークスルーの一つが、ガーディアンが人間と機械のそれぞれの能力や強みを融合し、調和的な車両制御を作りだした、ということです。このシステムのヒントになったのは、現代の戦闘機の飛行制御方法でした。そこでは、パイロットが操縦桿を握って操作をしているのですが、実際には、パイロットが直接戦闘機の操作をしているわけではないのです。その代わり、パイロットの意思が1秒あたり何千回という単位でフライトコントロールシステムに変換され、機体を安定させ、特定の安全なエリアに戦闘機を維持しているのです。
しかしこのように調和的制御を行うことは、自動車の場合、戦闘機に比べはるかに困難です。その理由は、車の場合の制御は、車の動きだけでなく、衝突を回避しなければいけない差し迫った環境下における全ての物に対する認識技術・予測技術によって決まってくるからです。
ここで私たちが強調したいのは、これは人間と機械の間でのオン・オフスイッチのようなものではないということです。これは、人間と機械がチームメイトとして、お互いの良い部分を引き出すような、ほぼシームレスな調和的システムなのです。
ガーディアンは、人間のドライバーか、トヨタもしくは他社の自動運転システムによっても操作が可能な、高度安全運転支援システムの一つとして開発中です。これこそが、ガーディアンのキーとなる能力です。
昨年のCESで豊田社長が発表したように、トヨタはガーディアンをMaaS(Mobility as a Service)向けに開発しているe-Paletteに標準装備として組み込むことを計画しています。これにより、MaaSのフリート顧客はどのような自動運転システムを使っても、トヨタのガーディアンを一種のフェイルセーフ、すなわちショーファー型自動運転システムの冗長システム(システムに障害が発生するケースに備えて、予備装置を配置・運用しておくもの)として使うことが出来ます。
プラットCEOは、自動運転システムが抱える、技術的・社会学的な難しさを甘く見てはいけないということを強調しています。技術的には、絶え間なく変わる環境において、人間のドライバーと同等の、もしくはそれより優れた運転をするうえで必要な社会順応性を、どのように機械に教えるのか、ということ。また社会学的な点は、発生が避けられない自動運転車による事故や死傷を社会が受け入れるには、相当長い時間がかかるかもしれない、ということです。
プラットCEOは続けました。「同時に、私たちには、自動運転技術で出来る限り多くの命をなるべく早く救うという義務があります。」
それゆえに、昨年TRIは、ガーディアンをより「賢く」することに注力してきました。ガーディアンが学習を重ね、より賢くなるためには、一般路上では危険すぎて実験できない難しいケースや要求の厳しいシナリオにも対応しなくてはなりません。クローズドのテストコースでは、ガーディアンの知能や能力をより拡充し、より過酷な形で試せます。継続的な改善によって、ガーディアンは、ドライバーを導く最適な方法を学び、極度の危険が伴う環境でどのように反応するのが良いか学んでいきます。
このように成長していくガーディアンの能力は、プレスカンファレンスでお見せした3台が関係したカリフォルニア州での事故を、私たちに学びを与える前向きなケースにしてくれます。私たち自身とセンサーやカメラの目の前で、3台の車が高速道路上で起こしたあの危険な状況は、偶然に発生した「想定外のシナリオ」でした。
実際の事故データから、非常に正確なシミュレーションを作りだしました。そして、車が一秒に満たない時間内で衝突回避の選択肢を引き出すための学習ツールにしたのです。テストコースでは、実車と、柔らかな素材でできたダミー車両を活用して状況を再現しました。
この場合、ガーディアンのもっとも望ましいオプションは、安全に加速をし、近づいてくる車両から離れることでした。これは、ガーディアンが衝突そのものを避けられるか、衝撃を和らげることができる一方で、他の車両にも同様な効果をもたらす可能性があるケースでもあります。つまり、「利他的(他の車も守ってくれる)ガーディアン」ということです。
さらにプラットCEOは、より心を揺さぶるようなガーディアンの潜在能力について強調しました。「人間には自立して自由に動き回れることを求める基本的な欲求があり、これは自動運転車への欲求よりもはるかに大きなものです。これは、お子さんが最初に立つことを習うときに、両親のちからを借りずに部屋中を歩き回るときにはじまる、純粋なモビリティの喜びです。そして、これはハンドルを握り、加速しブレーキングし、まるで体の延長のように走りを味わうドライブの喜びでもあります。」
ハンドルを握り、道路から目線を離さないことは安全の第一歩です。でもそれは単に安全のためだけではありません。ドライバーが運転をしている時にどのように感じるか、ということなのです。つまり、乗っているだけでなく、安全に安心して走りを楽しめるということです。
また、このことは、安全技術の普及という、トヨタ/レクサスが約3年前に先駆けて表明した哲学でもあります。3年前から、トヨタ/レクサスは衝突被害軽減自動ブレーキを米国で販売するほぼすべてのモデルに標準装備化を開始し、現在では完了しています。
プラットCEOは最後に以下のように話しました。「自動運転のもっとも重要なメリットは、クルマの操作を自動化するということではなく、ヒトの安全と、自由なモビリティを支えるということなのです。」
以上
ダウンロード(動画)
-

- Crash

-

- Pop Out

-

- Simulation

-

- Slalom

ダウンロード(画像)
-
-

- Pop Out
-
-
-

- Pop Out
-
-
-
- Scenario
-
-
-

- Scenario
-
-
-

- Slalom
-

アクセスランキング


-あわせてランドクルーザー"70"の日本再導入を発表-


